





 换一批
换一批
当前位置:
首页
/
工程图纸
/
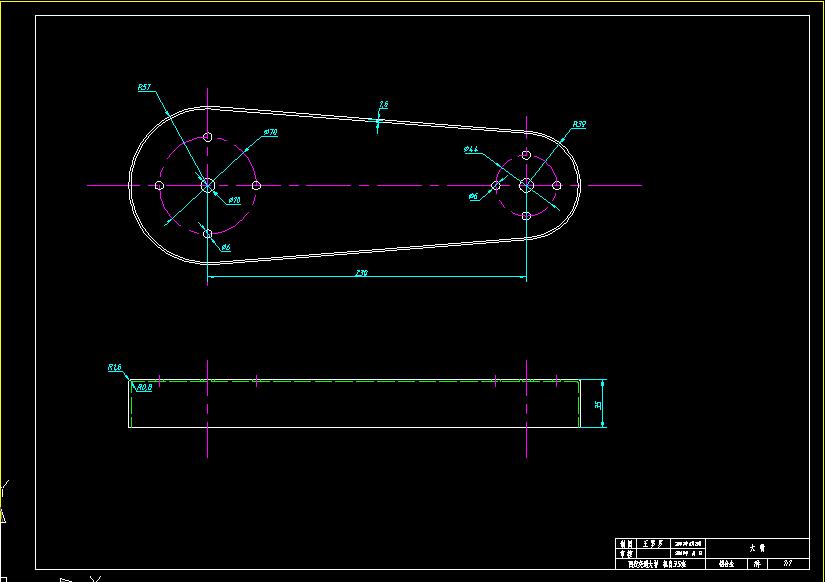
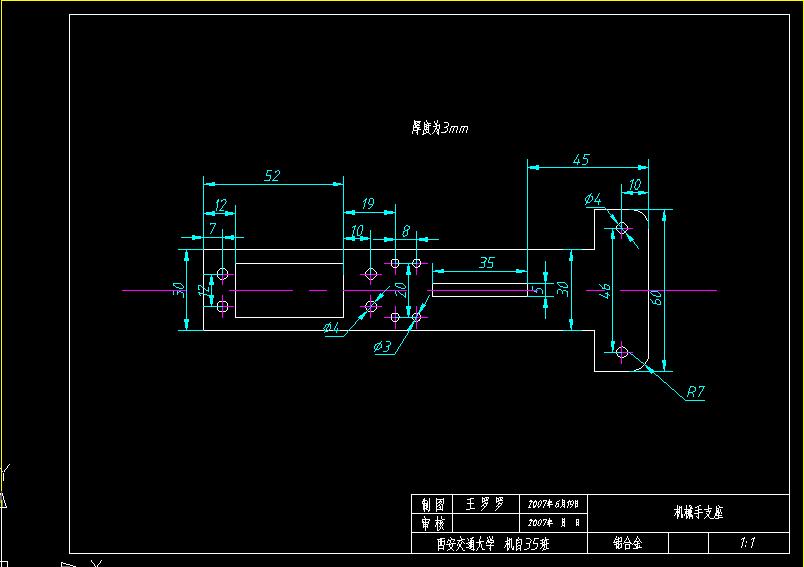
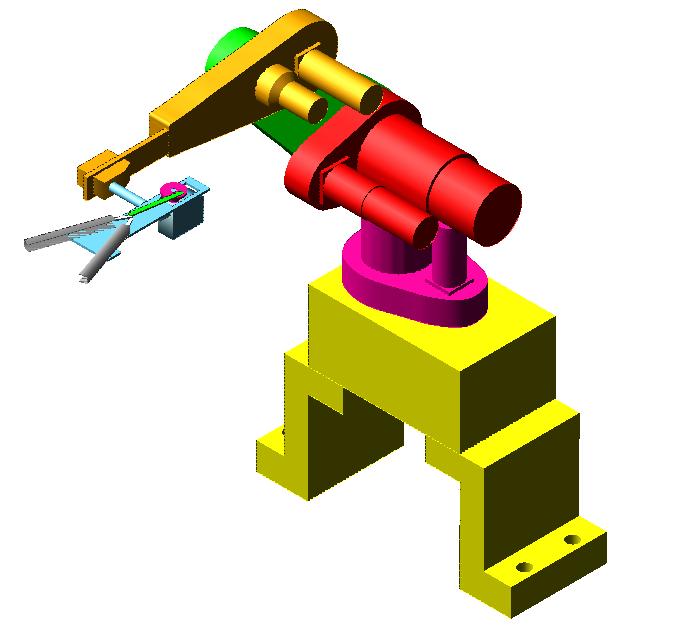
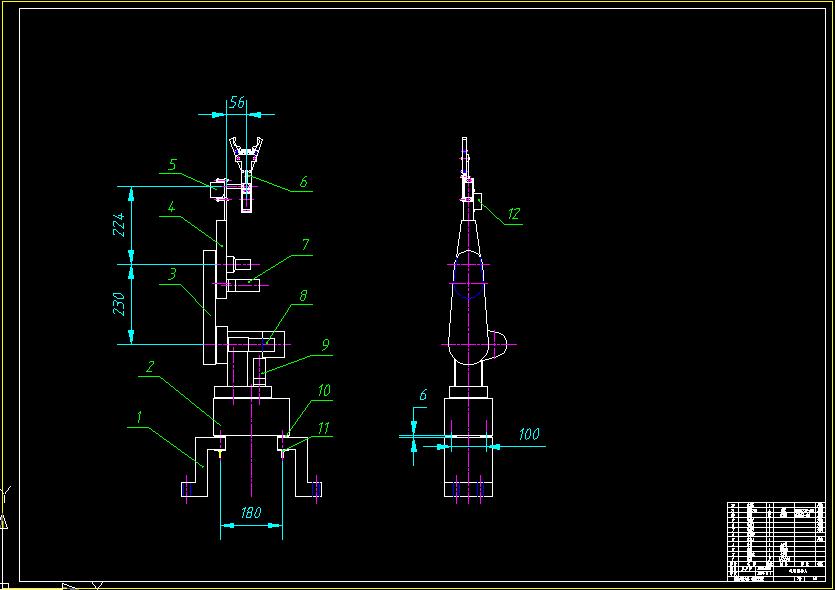
四自由度工业机器人设计
相关推荐
热门下载
最新资源
换一批
换一批
换一批
下载文件列表×
| 选择 | 文件名 | 大小 | 主文件 | 格式/板式 |
|---|---|---|---|---|
四自由度工业机器人设计.zip |
174K |
/ |
AutoCAD/2004 |

四自由度工业机器人设计.zip
174K
/
AutoCAD/2004/2004