


 换一批
换一批
当前位置:
首页
/
设计图库
/
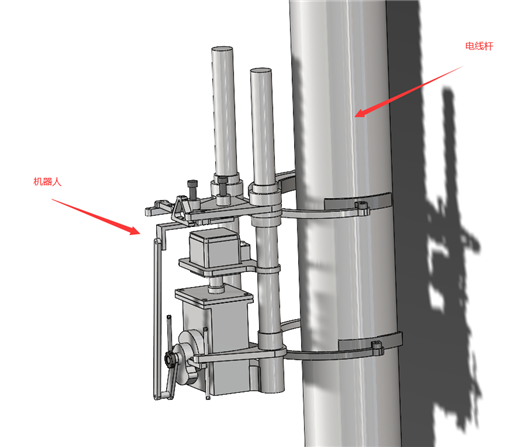
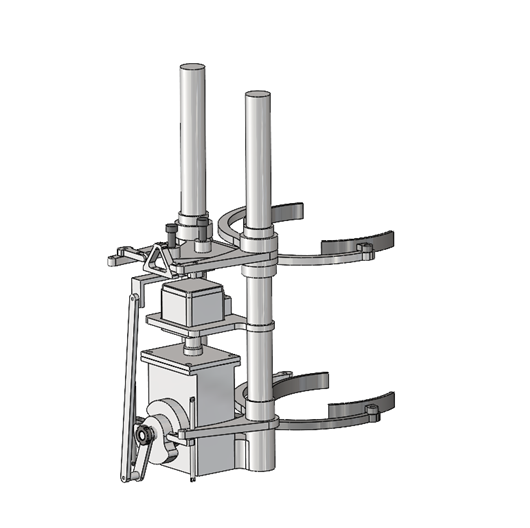
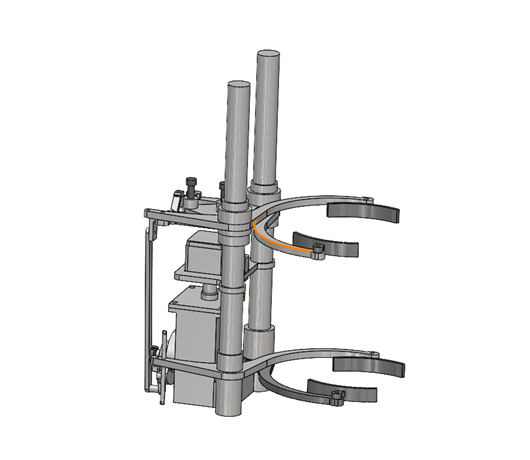
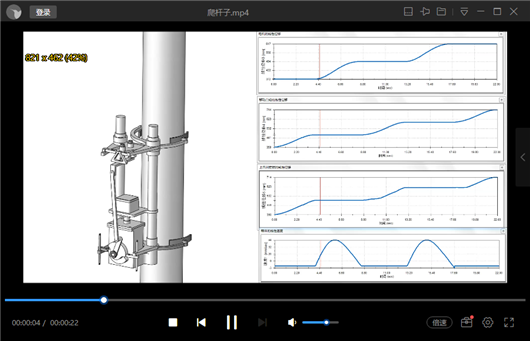
自动爬电线杆机器人及运动仿真
相关推荐
热门下载
最新资源
换一批
换一批
换一批
下载文件列表×
| 选择 | 文件名 | 大小 | 主文件 | 格式/板式 |
|---|---|---|---|---|
自动爬电线杆机器人及运动仿真.rar |
89.59M |
/ |
SolidWorks/2022 |

自动爬电线杆机器人及运动仿真.rar
89.59M
/
SolidWorks/2022/2022
该爬杆机器人的爬行动作类似于蚯蚓的爬行,机器人有上下两个加紧机构组成,两个加紧机构是间歇运动,下面的加紧机构加紧杆子时,曲柄滑块机构将上面的加紧机构张开并迫使上面的加紧机构上移一段距离。然后上面的加紧机构加紧杆子,曲柄滑块机构接着将下面的加紧机构张开并迫使下面的加紧机构上移一段距离。如此重复多次就实现了爬竿动作。